
| Главная | Почта | Ссылки | Онлайн ТВ | О клубе |
|
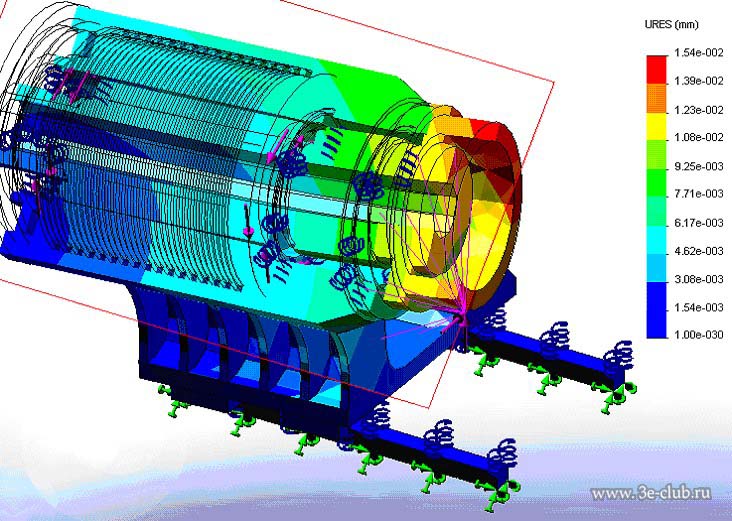
На рисунке 1 показано сечение эпюры упругих перемещений. Модель состоит из шпинделя, корпуса шпиндельного узла, встроенного электродвигателя, передней и задней подшипниковых опор и линейных направляющих, обеспечивающих возможность продольного перемещение узла. На фланце шпинделя установлена обрабатываемая детал Передняя и задняя опоры моделируются при помощи упругих связей. К детали, закрепленной на фланце шпинделя, приложена сила резания. На шпиндель действует момент равный моменту силы резания. На корпус действует момент равный моменту резания, но противоположный по знаку. Таким образом моделируется встроенный электродвигатель. Сам корпус установлен на линейные направляющие качения. Их жесткость также представлена упругими связями.
Рисунок 1 – Эпюра упругих перемещений. Проанализируем рисунок 1. На нем изображены перемещения в модели шпиндельного узла, вызванные упругими деформациями. Максимальные значения смещений достигают 15 мкм (URES 1.54e-002, mm) на внешней грани детали, закрепленной во фланце, что находится в пределах допуска на чистовое точение деталей диаметром 200 мм, по 7-8 квалитетам точности. Также, можно видеть, что все максимальные величины перемещений расположены в передней части корпуса вокруг места крепления передних подшипников. Это обусловлено тем, что передняя опора практически полностью воспринимает нагрузки от сил резания.
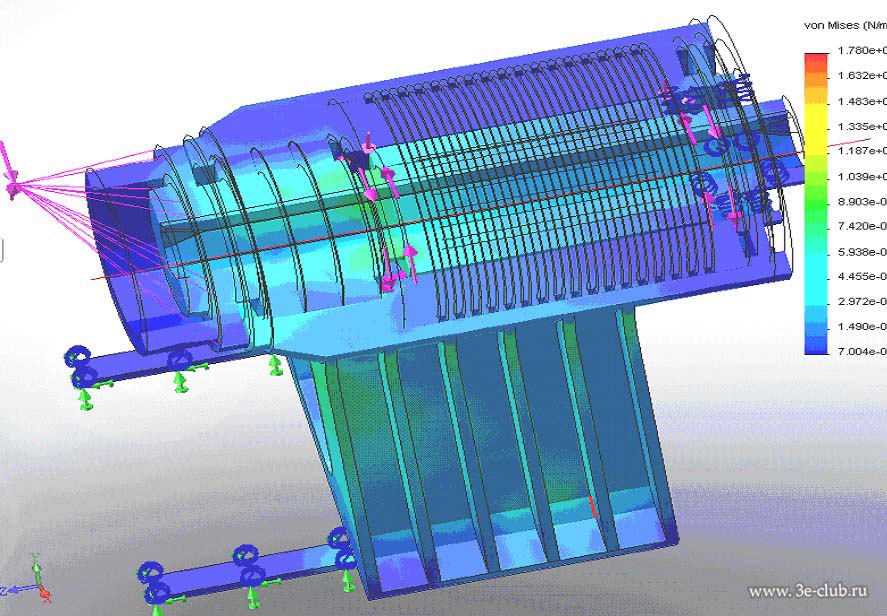
Рисунок 2 – Эпюра распределения напряжений. По эпюре, показанной на рисунке 2, можно судить о местах концентрации напряжений. В сечении составляющей силы резания Py, наблюдаются высокая плотность напряжений на шпинделе в месте перехода с шейки под передний подшипник к посадочному диаметру под ротор электродвигателя. Ротор, в свою очередь, вносит жесткость в шпиндельный узел, что говорит о выгодности использования встроенных двигателей. Также большую плотность напряжений можно наблюдать в подшипниковом узле. Это еще раз указывает на большое влияние данного узла на общую податливость конструкции. В опорной части корпуса можно наблюдать относительно равномерное распределение напряжений, однако, в месте крепления салазок направляющих качения плотность довольно велика. Инструментами CosmosWorks были измерены силы реакции опор, которые в зависимости от расположения имели значения от -1600 Н, до 2000 Н. Это значит, что некоторые части направляющих будут работать на растяжение, а другие – на сжатие. Допустимые моменты и статические нагрузки на опоры были выдержаны со значительным запасом. Дополнительно проведем исследование напряженно-деформированного состояния шпиндельного узла, используя в качестве модели подшипника ортотропную втулку. На рисунке 3 показана картина перемещений в модуле КШ. Можно заметить, что по сравнению с моделью подшипников с упругой связью (рис 1), в этой модели большие перемещения наблюдаются на подшипниках, передней и задней частях шпинделя, а также на задней крышке корпуса. Величина максимальных перемещений увеличилась до 17,5 мкм, характер расположения – не изменился.
Рисунок 3 – Эпюра упругих перемещений. В таблице 1 для двух представленных моделей уточнено влияние элементов конструкции узла на перемещение переднего конца шпинделя. С этой целью в модели переставляется поэлементно место фиксации, делая допущение, что остальные элементы абсолютно жесткие. В таблице выделены параметры, показывающие изменение величины перемещений, обусловленные влиянием элементов встроенного электродвигателя. Таким образом, отсутствие статора в корпусе первой модели увеличивает перемещения на 2,1%, что не очень значительно. Однако отсутствие ротора в обеих моделях заметно влияет на жесткость конструкции. В первой модели перемещения переднего конца шпинделя увеличиваются на 7,6%, что практически равно влиянию самого шпинделя. Во второй модели этот показатель еще больше и равен 13,1%. Отсюда можно сделать вывод о том, что жесткость шпинделя в значительной мере влияет на работу подшипников. Таблица 1 - Влияние элементов конструкции на точность ШУ.
В первой и второй моделях примерно половина перемещений обусловлена влиянием направляющих качения. На корпус приходится около четверти всех перемещений, что говорит о его высокой жесткости. Можно заметить, что при использовании ортотропной втулки доля перемещений вызванных подшипником выше на 6%. Это вызвано большей восприимчивостью данной модели к действию изгибающих моментов. На долю шпинделя приходится менее десятой части общего изменения положения его переднего конца. Выводы:
Комментарии: Нет комментариев.
|
||||||||||||||||||||||||||||||||







![]()