
| Главная | Почта | Ссылки | Онлайн ТВ | О клубе |
|
В начале пару слов о понятии "зооморф", в том смысле в котором его понимает сам автор. Зооморф (греч. "зоо"- животное, "морф" - подобный) - что-то или кто-то, принимающее внешний вид кого-либо животного. Исходя из того, что животный мир на Земле отличается весьма огромным разнообразием видов, следует ожидать, что и видов искусственных зооморфов может достигать огромного числа(жучки, паувучки, рибки) В отличии, скажем, от андроидов, где простор для технической реализации значительно уже.
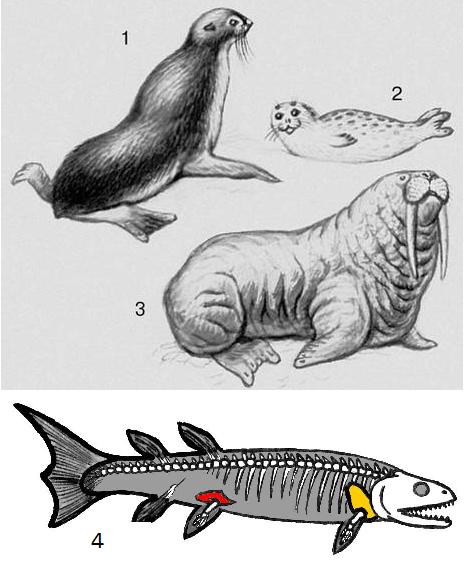
Рисунок 1 - Морской котик, тюлень, морж, кистеперая рыба. В данной статье аватар решил ограничиться созданием зооморфа, повторяющего некоторые черты морских млекопитающих или древних кистеперых рыб. У этих животных при передвижении по суше роль задних конечностей практически сведена к нулю, главную роль играют мощние передние конечности. Техническое задание. Разработать мобильный автономный робот под управлением микроконтроллера серии AVR. В качестве силового привода использовать 4 серводвигателя, для поворота головы поставить одну маломощную микросерву. Источник питания на 4-х стандартных аккумуляторах формата АА, такой выбор объясняется легкостью зарядки, универсальностью и неприхотливостью данного вида аккумуляторов. Связь с управляющим компьютером через терминал по протоколу RS-232, также прикрутить беспроводное ИК-упраление чрез пульт по RC5. В качестве фишек реализовать часы реального времени на базе PCF8583 с питанием от отдельной батарейки-таблетки. Также в электронной плате предумотреть разъём для подключения ЖКИ-индикатора.
Рисунок 2 - Блок-схема процесса проектирования. Эскизный проект. Первым делом определим компоновку, т.е. то как будут располагаться элементы робота относительно друг от друга в пространстве. Измерив основные геометрические параметры серводвигателей, аккумуляторного отсека и оценночные размеры печатной платы, перейдём в виртуальное трехмерное пространство. Для этих целей используем лучшую российскую САПР Компас 3D.
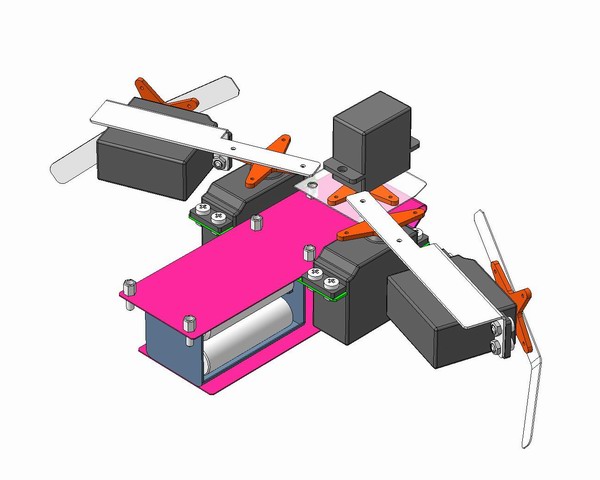
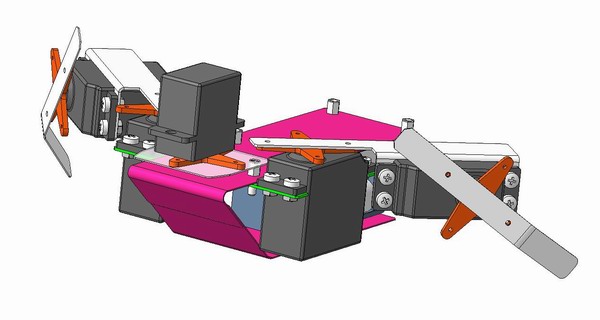
Рисунок 3 - Компоновка. Вид сбоку с прижатыми конченостями.
Рисунок 4 - Компоновка. Вид сбоку с вытянутыми конечностями.
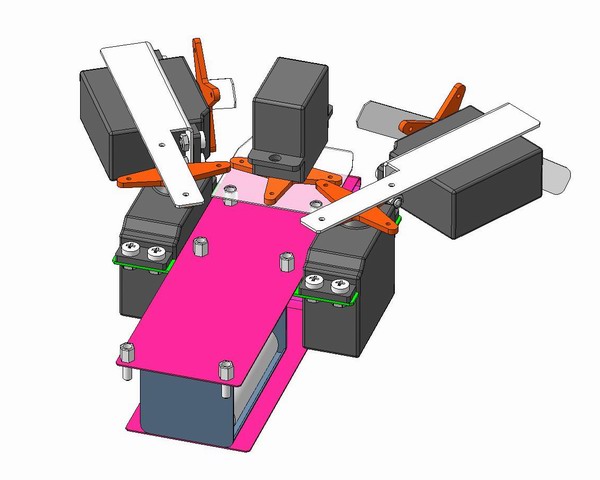
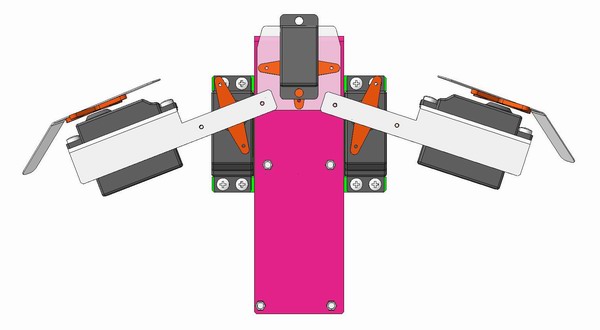
Рисунок 5 - Компоновка. Вид спереди.
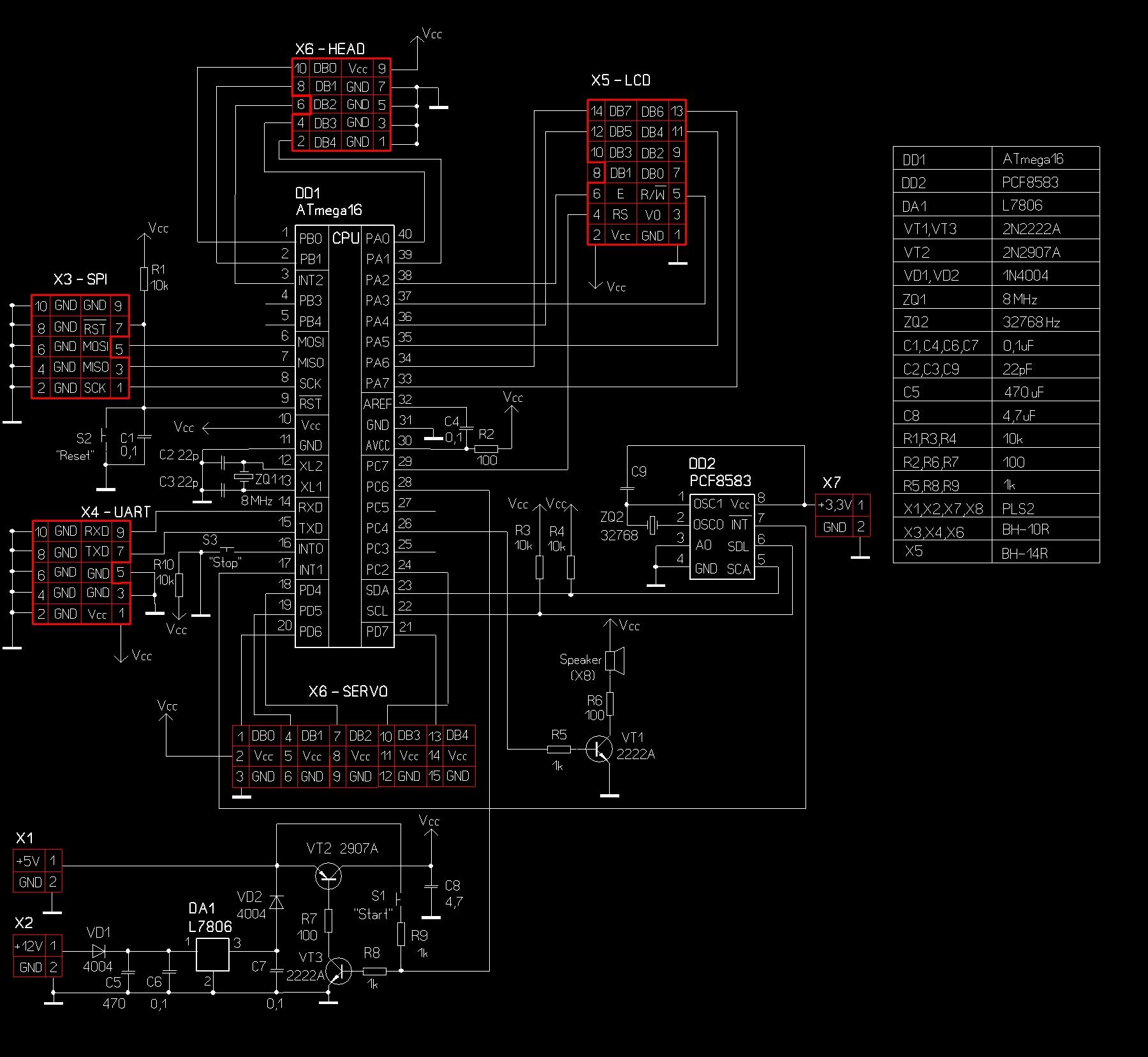
Рисунок 6 - Компоновка. Вид сверху. Разработка электронной платы. Параллельно с компоновкой прорабатываем систему управления. Её центральным звеном является микроконтроллер atmega16, электроннное сердце которого пульсирует с частотой 8 Мгц. В роли дифибрилятора служит кнопочка S1 "Start", удержание которой в течении 2 сек приведет МК в чувство. Интересный момент, в электронику заложена функция самовыключения питания (см. линии PC6). Для синхронизации времени спариваем I2C выводы контроллера с микросхемкой PCF8583.
Рисунок 7 - Схема электрическая принципиальная.
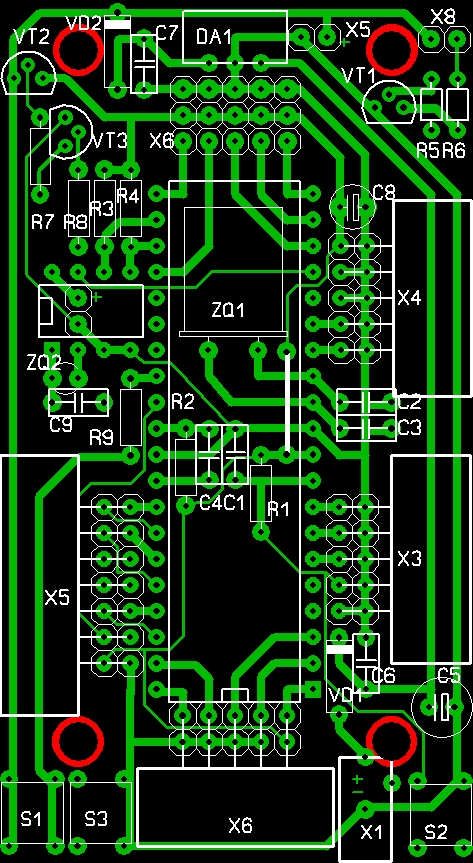
Рисунок 8 - Печатная плата. Деталировка механических узлов и сборка. Деталировка отдельных деталей сделана в Компас до вплоть до чертежей. Одной из важнейших задач проектирования является проверка всего механизма на соударения его подвижных узлов. К счастью стандартными средствами Компаса эта задача решается в "два клика". После подготовки чертежей переходим к изготовлению. Я не располагаю минифрезерным станком, и этот этап был для меня не самых приятных. Далее сборка. Сборка, в этом деле , самое хлопотное и трудоёмкое занятие. Причина в том, что размеры самопальных узлов и деталей получены в лучшем случае по 14-м квалитету, не говоря уже о непараллельности и межосевых расстояний крепежных отверстий
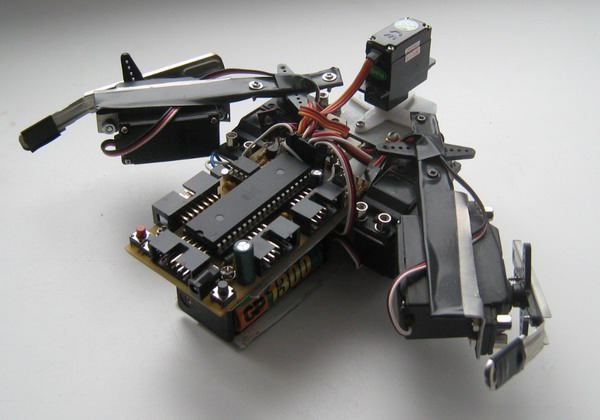
Рисунок 9 - Робот "Морж". Вид сбоку с прижатыми конченостями.
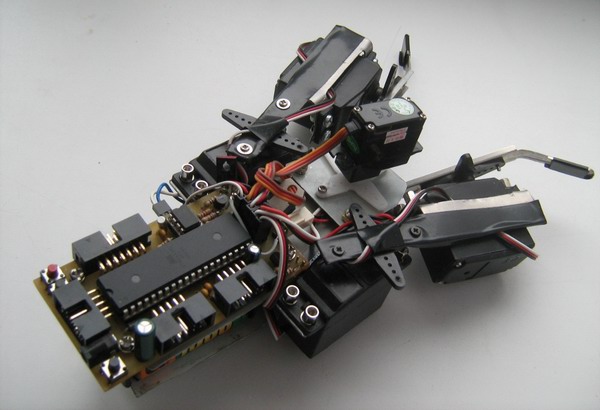
Рисунок 10 - Робот "Морж". Вид сбоку с вытянутыми конечностями.
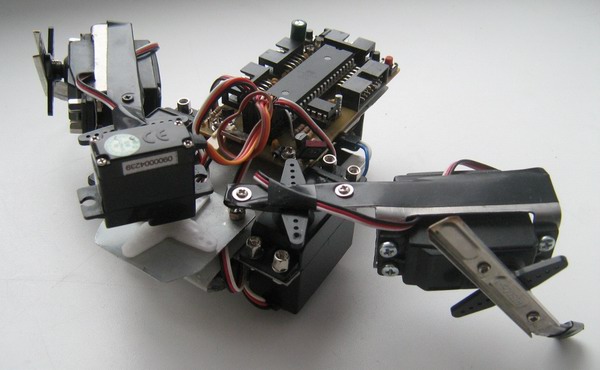
Рисунок 11 - Робот "Морж". Вид спереди.
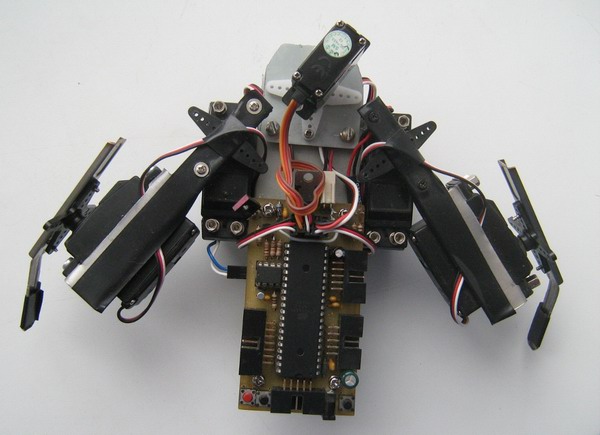
Рисунок 12 - Робот "Морж". Вид сверху. Видео. На первом ролике робот отрабатывает команду на движение вперед, на втором и на третьем - разворот. P.S. Увенчалась ли данная попытка успехом пускай решит сам читатель. Программа написана на Си в WinAvr. К статье прилагается полный исходник.
Комментарии: Нет комментариев.
|
|||||||||||||||||||||||||||||||||





![]()